About Me
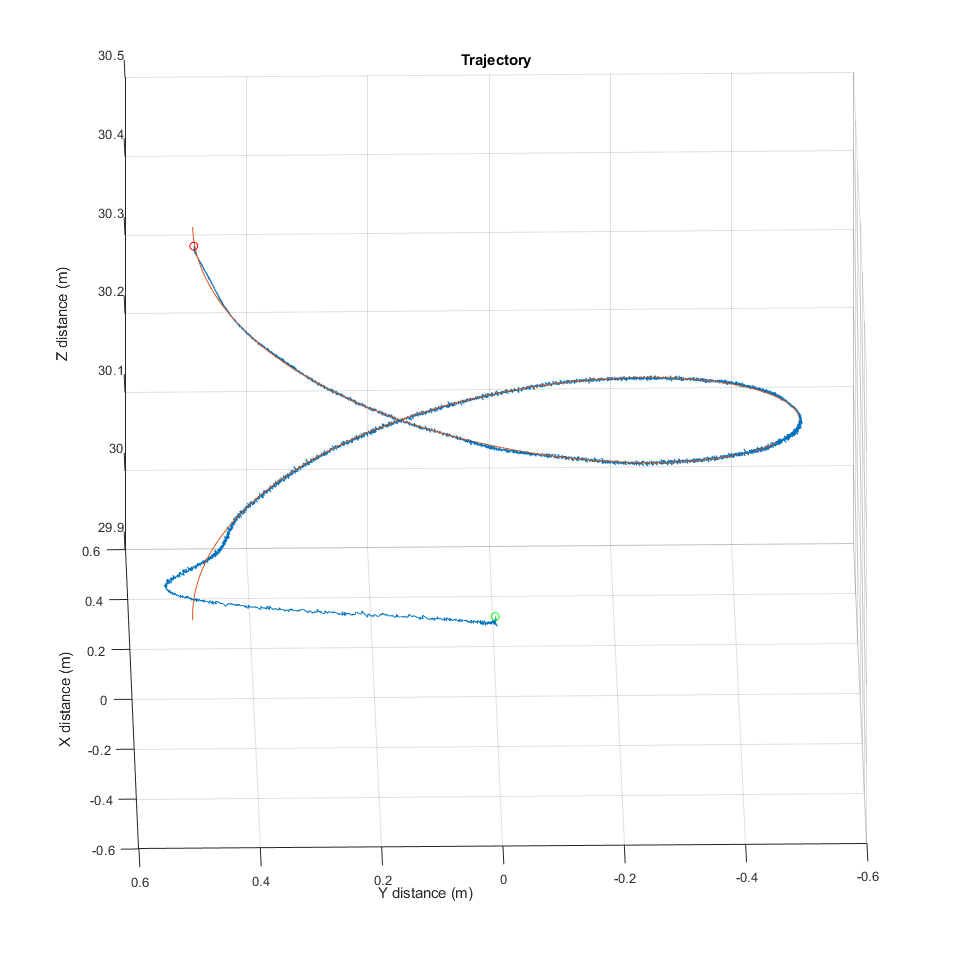
I grew up in Indiana building rockets and hacking electronics. At Cornell University, I focused on designing, building, and the testing avionics and GNC subsystems of multiple spacecraft. I also ran the Cornell Maker Lab, an excellent resource for student prototype development. I was a PhD student at CU Boulder, where I got my master's degree in the Entry systems Design Lab under Robert D. Braun on developing algorithms for landing rockets.
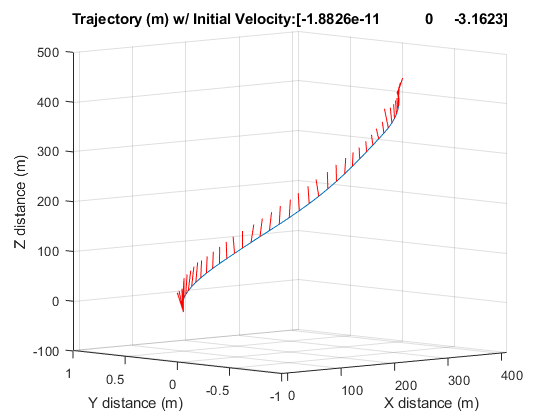
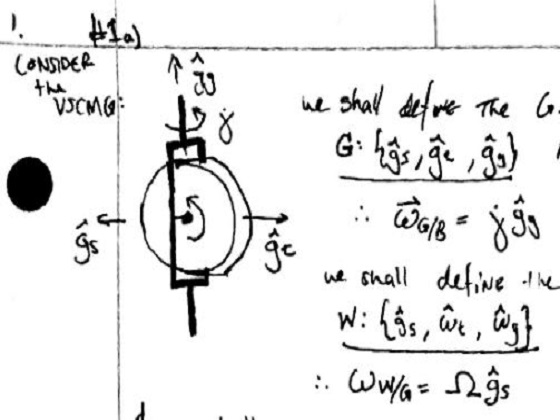

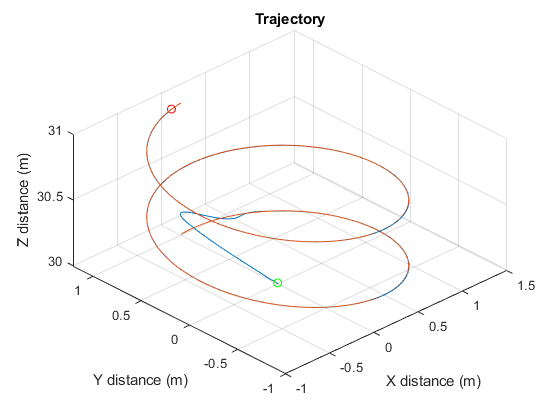
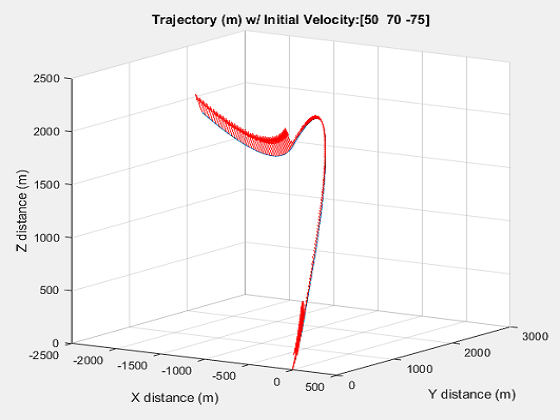




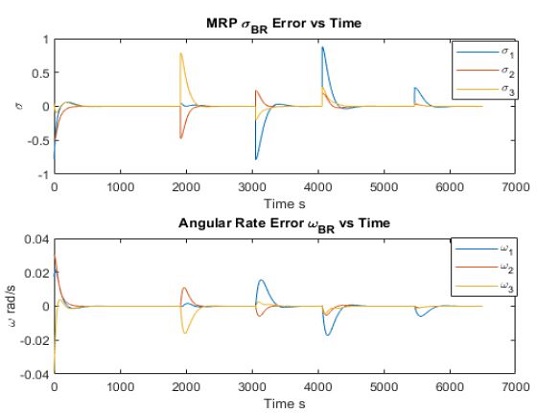

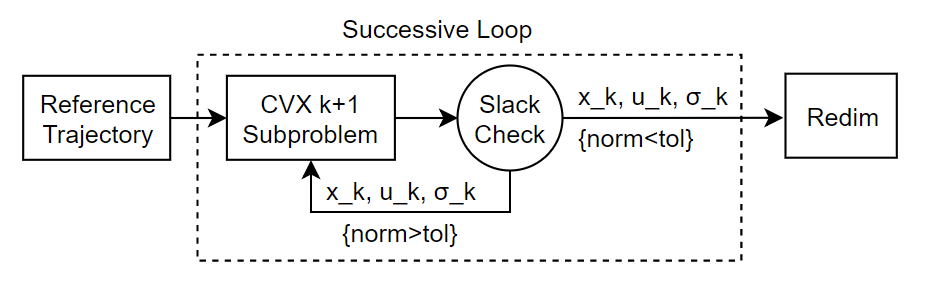
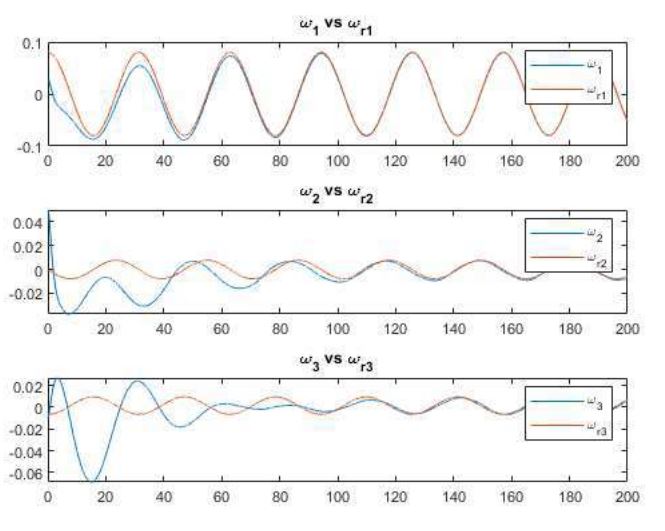
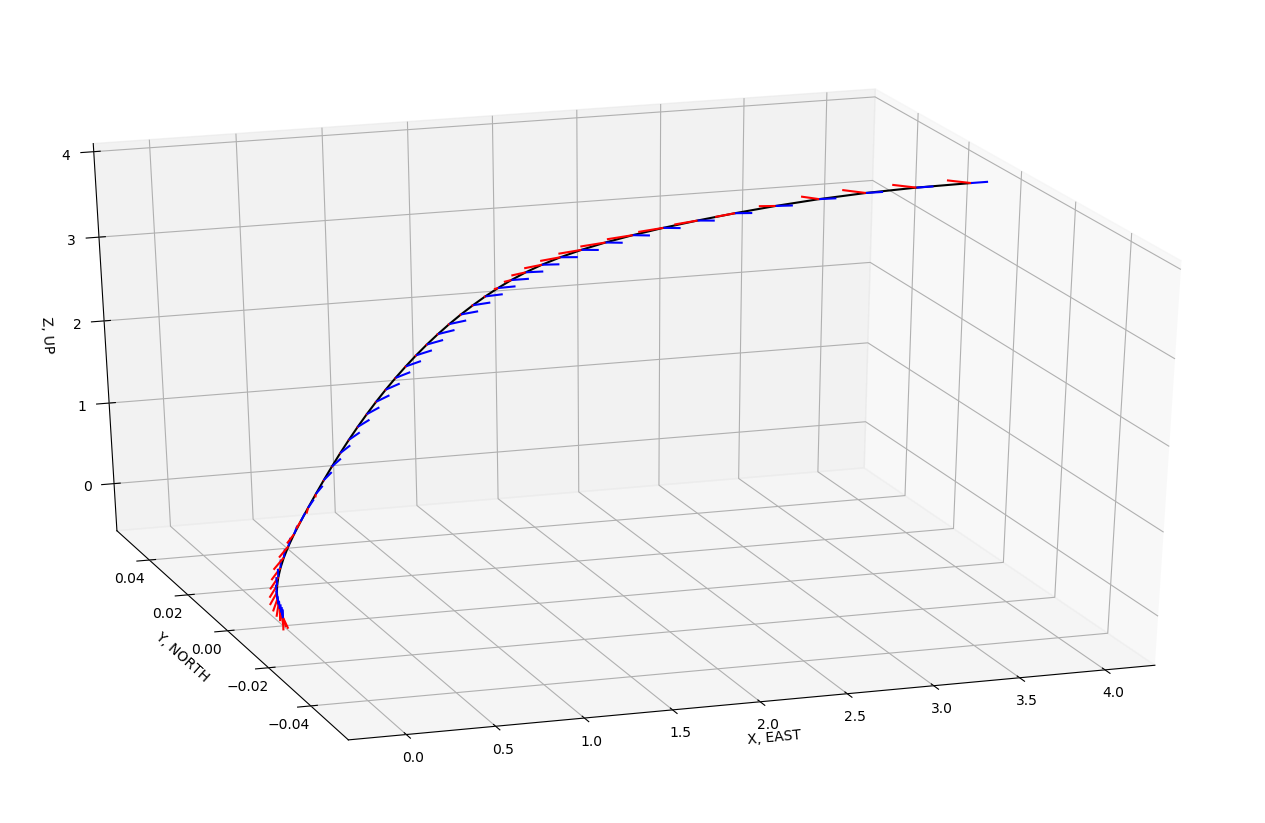 I also presented similar work at IPPW 2019 at Oxford University, where I implemented the algorithm with slight modifications including MRP dynamics.
I also presented similar work at IPPW 2019 at Oxford University, where I implemented the algorithm with slight modifications including MRP dynamics.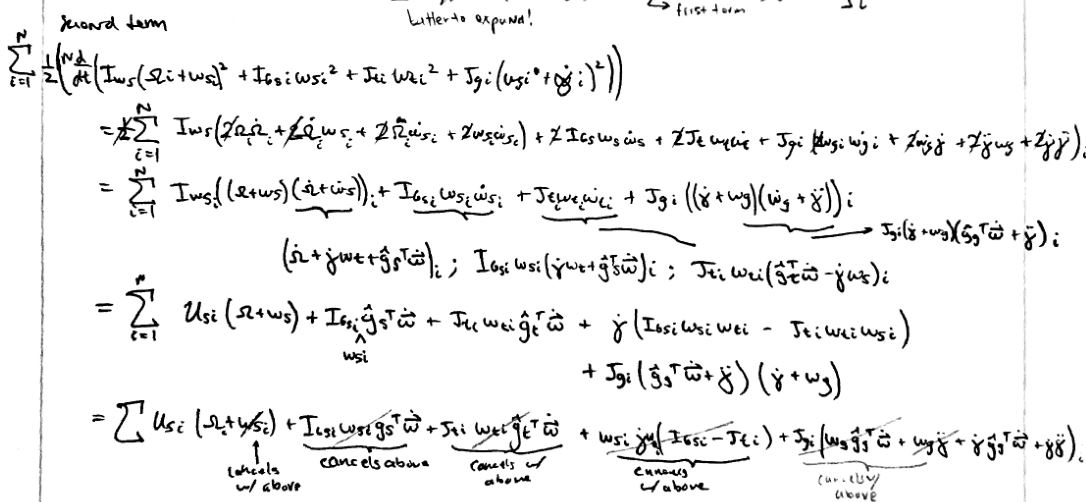

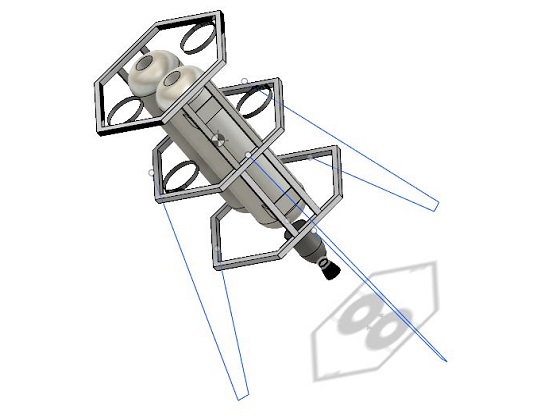
 I also got a pressure sphere and some Marotta valves... We shall see where this project takes me.
I also got a pressure sphere and some Marotta valves... We shall see where this project takes me.

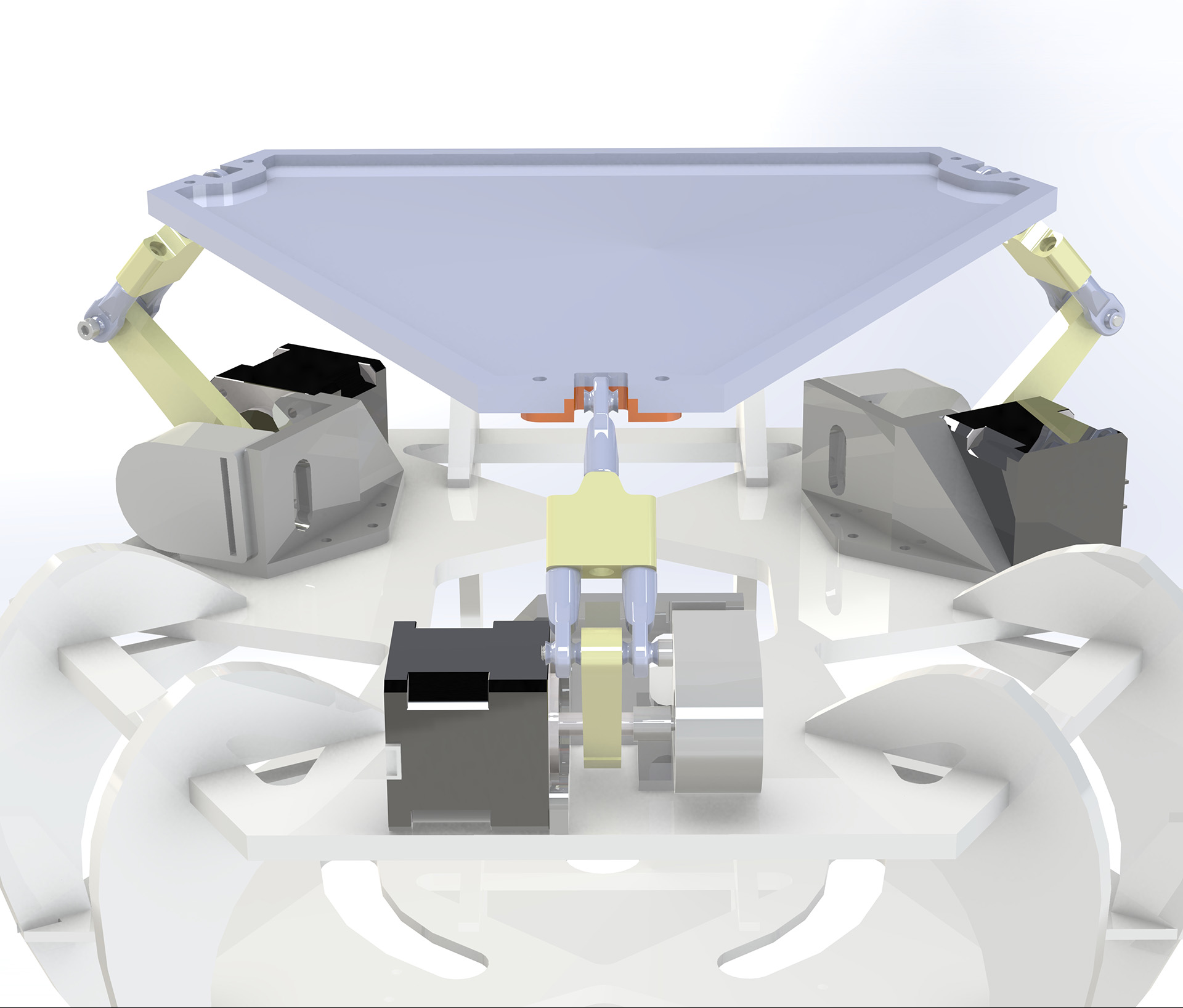
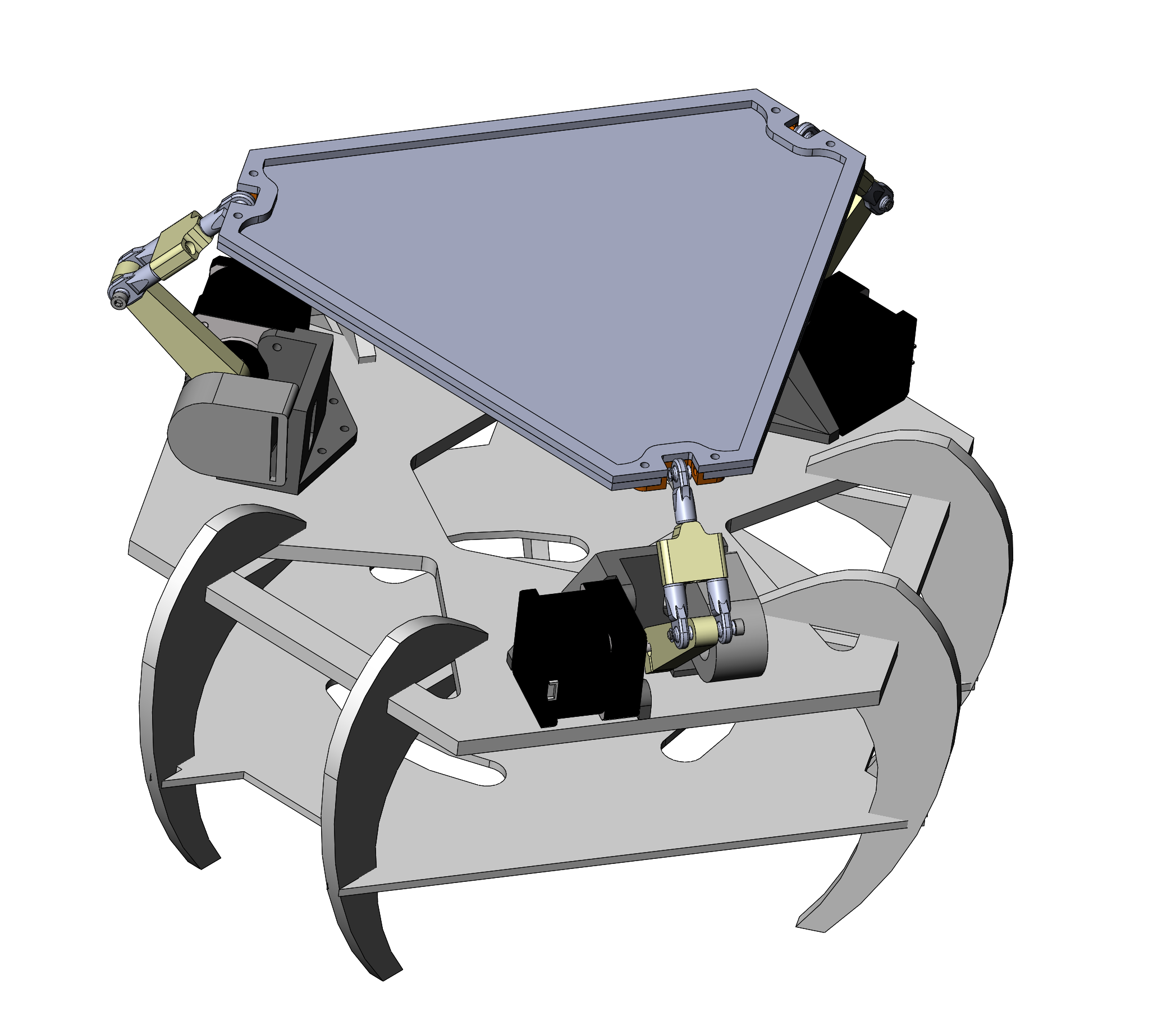 This was a super fun project and I have gotten a lot of attention from it.
This was a super fun project and I have gotten a lot of attention from it.
 I have made another for a customer.
I have made another for a customer.
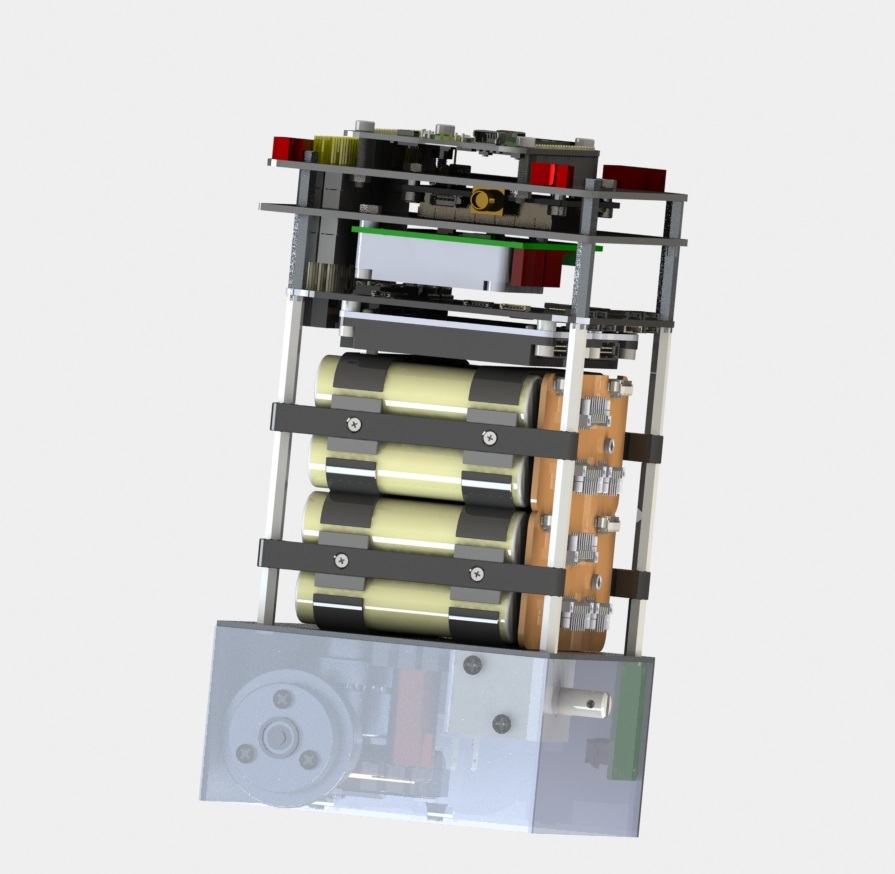
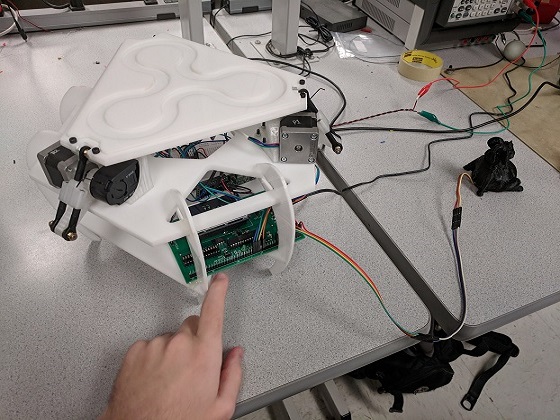
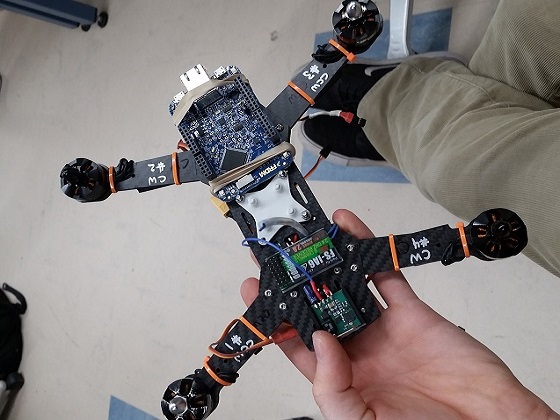
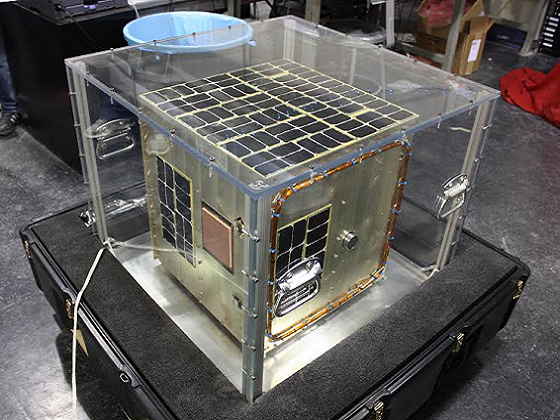
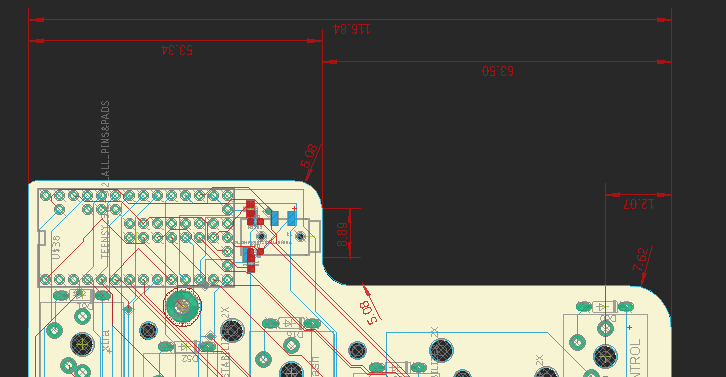
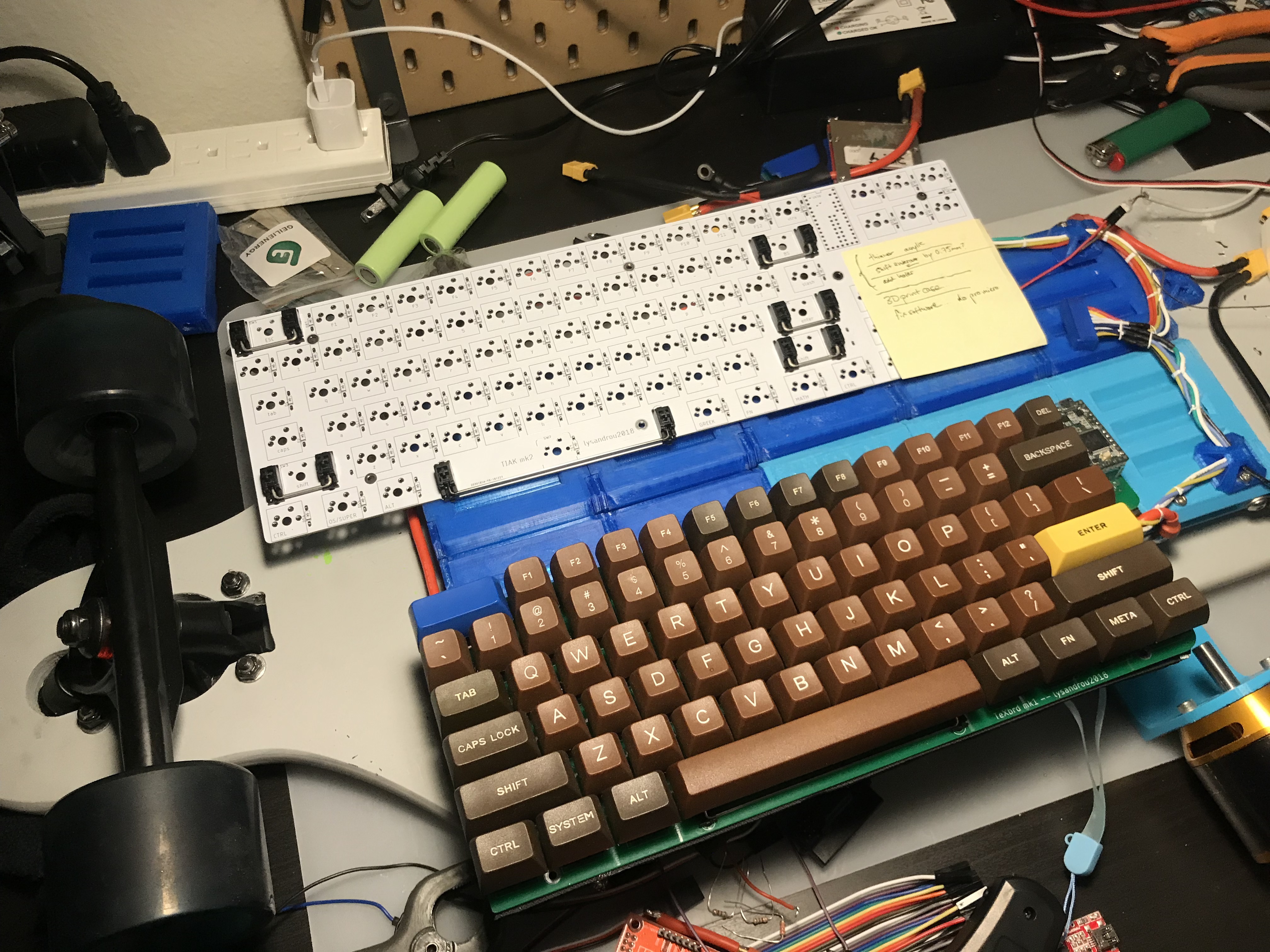
 Here you see the MkI hardware with a MkII PCB in the background.
Here you see the MkI hardware with a MkII PCB in the background.




 I also got to meet astronaut and SpaceX VP Garret Reisman!
I also got to meet astronaut and SpaceX VP Garret Reisman!